
触感交互涂层基于有机硅和硅氧烷-多元醇的聚氨酯柔性材料
2017-11-17 10:09:01
作者:本网整理 来源:网络
分享至:


虽然涂层的感官吸引力一直是消费者选择设备和电器的重要因素,但是在主要关注光学性能的行业中,涂层的积极触觉交互性能越来越受到重视。因此,了解外观和这些触感特性的功能意义,就能很好地抓住机会。人体与表面接触可以产生两方面的反应,积极正面反应和消极负面反应;积极正面反应通常是与诸如“柔感”、“光滑”、“温暖”、“缓冲”和“光亮”等术语有关,但只在特定用途的情况下才有意义。如,“光滑”在一个用途中可能是积极正面的特性,而在另一个用途中可能是消极负面的特性。与金属、纤维素或聚合物这类通常令人感到沉闷甚至不愉快的基材直接接触,通过用能不同程度刺激皮肤的机械和热感觉器官的涂层进行涂覆调节,会将基材的颜色转变成另一种令人愉快的或甚至具有奢华感的交互效果。依赖于涂层的触感交互作用的应用有:健康设施、移动设备、汽车内饰、合成皮革,广义上还包括织物饰面、颜色和护发产品。消极触觉交互交互作用可能会直接导致涂层的触摸摩擦效果失效;在纺织涂层中它们可能与摩擦和模量性能有关,甚至会导致褥疮溃疡。最后,触感性能问题对从手持设备到人机交互的交互设备的市场接受度的影响至关重要。
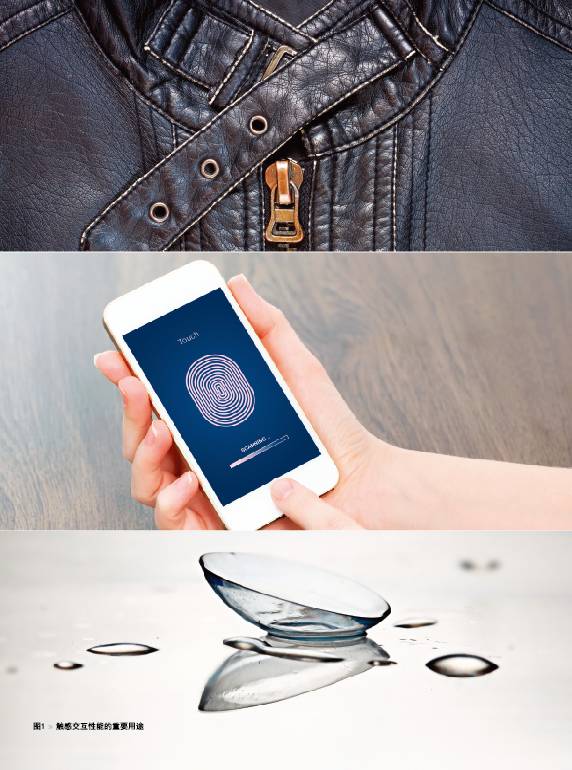
图1显示了触感交互作用与功能特性相结合的各种用途。合成皮革表面处理需要控制模量和摩擦系数。用于指纹识别的电容阵列需要综合考虑触感交互作用、介电性能以及气体和水分的渗透性。隐形眼镜中使用的硅氧烷-聚氨酯共聚物的氧气渗透性、亲水性和机械性能在医疗领域尤其需要控制,它们可以从大体积模块转变成厚膜。
特定涂层的感官魅力可通过一定距离的视觉效果感知。然而,人体接触时的触摸效果和动态效果则是固有的考虑因素,涂层的可接受性取决于积极的触感交互作用。物体触摸效果和动态效果的结合可定义为“触感交互”。
从整体来说,乙烯基增塑溶胶和聚氨酯类柔性材料在正向触感交互涂层领域占主导地位,但有机硅和硅氧烷改性聚氨酯却在精准交互有着至关重要作用的领域却占主导。有机硅和硅氧烷改性的聚氨酯已经很好地用于热固性和热塑性材料。在医疗领域尤其如此,它们已被用于制造诸如导管、起搏器引线和人造心脏瓣膜的装置。虽然生物相容性是与这些材料关的突出性能,但是它们通常能提供积极的触感交互作用。与这些材料的可用性以及积极的触感交互作用相关的可衡量的物理性能,包括疏水性、柔韧性、低表面能和摩擦系数(包括干摩擦和湿摩擦)。截至目前,这些已明确的性能尚未在涂料中得到广泛应用。部分原因是因为缺乏适合硅氧烷改性聚氨酯配方的硅氧烷多元醇,分子量过高或太分散,都不能获得想要的涂膜机械性能。此外,常规平衡聚合的硅氧烷(挥发性环状物)固有的低分子量的污染物,也会干扰成膜性能和与底材间的附着力。然而,聚硅氧烷可控的聚合作用能够制备出具有精确分子结构的硅氧烷多元醇,然后可以使其反应合成适用于制备积极触感交互涂层的有机硅和聚氨酯。根据使用的硅氧烷多元醇,新型聚氨酯材料分为两类:远螯硅氧烷聚合物(两个末端具有相同的官能团)和硅氧烷大分子单体(在一个末端具有官能团的低聚物材料)。这些材料中羟基的特定位置和数量使得可以将硅氧烷作为链段,终端嵌段和独特的侧基引入聚氨酯中。
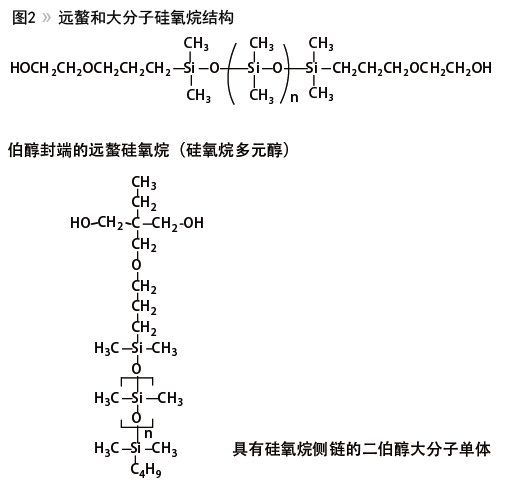
图2比较了远螯和大分子硅氧烷的结构。与传统的由聚醚多元醇得到的聚氨酯相比,由硅氧烷多元醇得到的聚氨酯在一些领域表现出具有改进的性能,包括光学、介电性能、紫外光稳定性、摩擦系数、不粘/释放性能、低模量和疏水性(表1)。

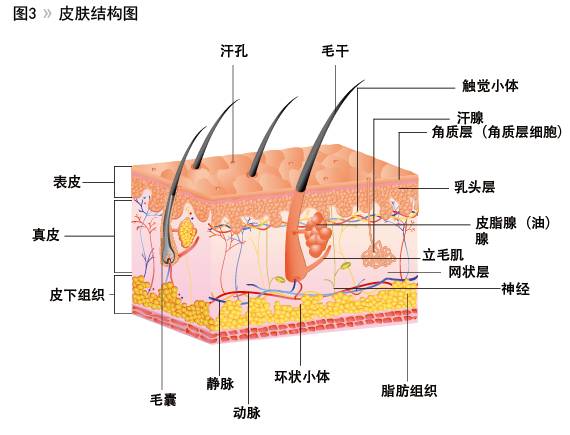
人类的触觉接触感知是复杂的,但是往往集中在摩擦系数、不粘/滑移性能、模量和相对疏水性上。虽然具有积极触感交互作用的材料通常并非用于皮肤复制,但是了解皮肤的基本结构和性能作为我们与这些材料交互作用的基准是至关重要的。皮肤的物理性能不断变化,取决于诸如身体上的位置、年龄、性别和水合作用等多种因素。一般来说,在与触觉交互作用有关的正常形变范围内,皮肤是不可压缩的、各向异性和非线性粘弹性。图3提供了皮肤结构的说明,而表2概述了主要从手和前臂的选定区域获得的数据计算出的皮肤物理性能(典型的平均值)。
有两种与积极触感交互作用有关的主要类型的涂层,其中使用硅氧烷-多元醇得到的聚氨酯凭借其性能优势应用于一些新领域。此类涂层的物理性能与皮肤大致相似。在第一类中,与基材间的间接交互作用(例如,纹理或电容)是至关重要的。电容性交互作用的例子是通过亚微米电容阵列的指纹识别,虽然它们被涂覆以提供保护作用,但仍保持对指尖结构的响应;这些通常是薄涂层(<250微米),在电子领域中通常被称为“保形”涂层。在第二类涂层中,需要用使用参数定义的特殊阻力来说明物理位移(例如压痕或摩擦位移)。这些涂层的厚度通常>1000微米。除了涂层材料的内在性能外,还必须考虑其他因素,如涂层厚度和涂层与基材的模量比值。通常,薄膜或保形涂层具有高的硅氧烷含量,它们作为链段被加入到聚氨酯中,而厚膜或大体积涂层具有较低的硅氧烷含量,它们作为侧链加入。
薄膜或保形硅氧烷改性聚氨酯
当要求基材的结构特征或纹理必须保持明显时,所选择的涂层能够保形变得至关重要。薄膜或保形有机硅涂层依赖于有机硅主链的柔韧性(图4)。例如,聚二甲基硅氧烷受热力学驱动而扩散并形成单分子涂膜,因为它的表面张力(20.4mN/m)低于固体或约束涂膜的临界表面张力(22.7mN/m)。有机硅含量越高,形成保形膜的趋势就越大。对于含有远螯硅氧烷作为嵌段的聚合物,我们观察到,当嵌段中硅氧烷单元的数量低于6~8个时,柔韧性受到限制。因此,大多数配方使用至少10个硅氧烷单元以便使涂层具有保形性。表3a概述了市售的羟基封端的硅氧烷。在聚氨酯技术中,“多元醇”通常是指具有两个或者多个羟基基团的分子类别。这里的表格信息使用术语“伯醇”来指与碳原子直接相连的羟基。这样与直接连接到硅原子上的羟基(称为“硅烷醇”)区分开,而硅烷醇不能形成水解稳定的聚氨酯。
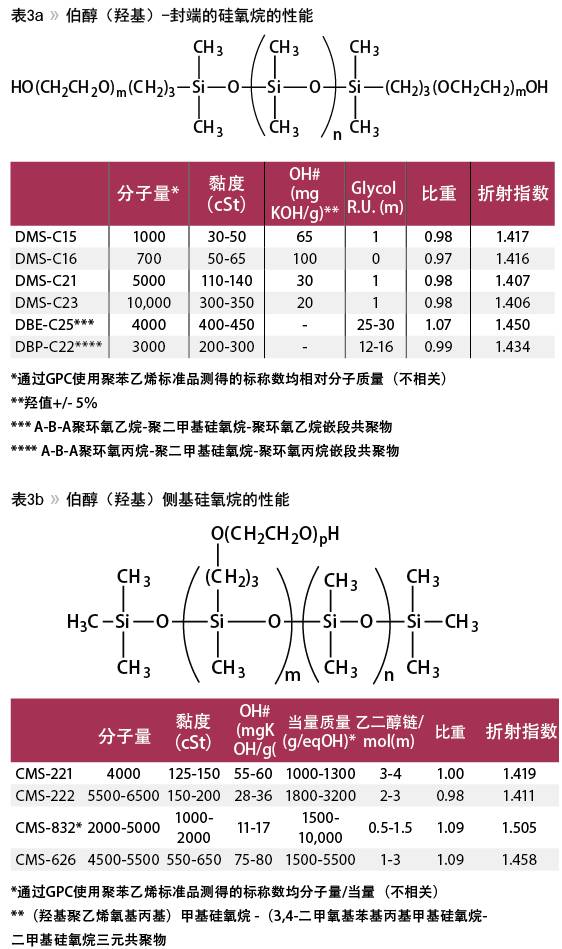
特定远螯的选择取决于机械性能组合的要求,即保形性、耐沾污性和润滑性能的结合。通常,保形性和耐沾污性随硅氧烷嵌段尺寸的增加而提高,而机械性能降低。然而,其他因素使这种简单关系变得复杂化。例如,如果润滑性需要流体动力学的水界面,则需要较高含量的聚(乙二醇)(PEG)含量。另一方面,如果需要与触感定位有关的低模量和最小滑动,则需要几乎不含或不含聚(乙二醇)(PEG)的大的硅氧烷嵌段。这些考虑因素会因另外的使用要求如摩擦系数而进一步复杂化:虽然必须始终考虑相对摩擦系数,但是特定用途表明还需要考虑更复杂的摩擦变量。如果静态摩擦系数高于动态摩擦系数,则材料将表现出不粘-滑动性能。更常见的是,材料将表现出比静态更高的动态摩擦系数,导致展示出粘滑性能。水也是一个经常需要考虑的因素。在针对皮肤接触棉织物的情况下,当织物润湿后,摩擦系数的变化超过了两倍,从0.42变为0.91。在其他情况下,水提供流体动力润滑层。虽然在某些用途中可能需要滑动性,在其他用途中制动性能可能更为重要(为了达到制动性能,摩擦系数应超过1)。表3b概述了具有侧链羟基的市售硅氧烷。
厚膜硅氧烷改性聚氨酯
通常,厚膜涂层能掩盖或改变下面的基材的纹理或结构。在这些用途中,表面触觉交互作用并不受影响,但是膜的硬度、模量和弹性变得更为重要。由于其机械强度远大于聚硅氧烷,所以聚氨酯的一般配方策略是保持有机的聚氨酯主链、引入硅氧烷作为侧基(图5)。与构成远螯主链的二甲基甲硅烷氧基相比,由于三甲基甲硅烷氧基端基具有较低的表面能,所以侧链的使用显著提高了斥水性。由于硅氧烷大分子单体相对较贵,标准配方的有机多元醇含量通常用最少量的硅氧烷大分子单体来代替,以提供所需要的典型的污染物释放或摩擦系数效果。使用硅氧烷大分子单体和异佛尔酮二异氰酸酯(IPDI)与传统多元醇组合使用,合成的皮革饰面提供了这种方法的成功案例。
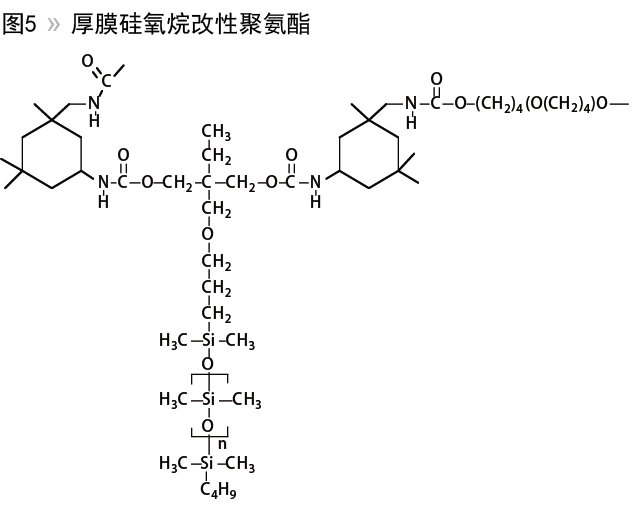
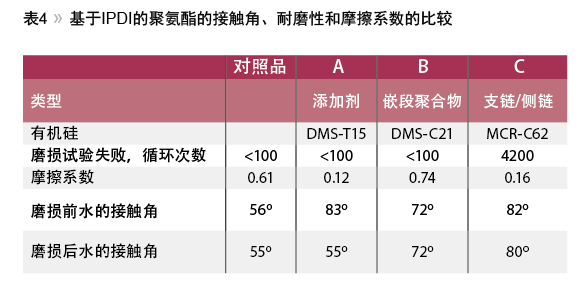
表4比较了通过添加下列物质进行改性的基于IPDI的聚氨酯:(A)不含官能团的聚二甲基硅氧烷[DMS-T15];(B)在聚氨酯中加入伯醇封端的远螯有机硅以形成嵌段共聚物(DMS-C21);和(C)二伯醇封端的大分子单体在树脂中聚合以引入侧链硅氧烷(MCR-C62)。所有情况下,有机硅的含量为3.0%~3.5%。当加成方法提高了接触角时,表明疏水性和释放性能提高,其效果随着磨损而降低。由远螯形成的嵌段聚合物显示接触角的适度增加,并在磨损后能保持,但是摩擦系数更高,耐磨性没有改善。由大分子单体形成的聚合物表现出疏水性增加,摩擦系数降低,耐磨性显著提高。结果可以用主链是非硅氧烷有机聚合物和仅在一端连接到聚合物主链的硅氧烷的自由旋转能来解释。

除了摩擦和释放性能之外,在聚氨酯聚合物结构中将硅氧烷作为软嵌段加入的优点,通常与能将硬度和模量降低到更接近人类软组织的硬度和模量的范围有关。配方的考虑因素更加复杂,性能优化取决于硅氧烷嵌段的类型和尺寸。此外,它们经常与其他软嵌段材料如聚(四氢呋喃)和脂族聚碳酸酯二醇一起使用。硅氧烷含量超过20%(基于质量百分比)是不寻常的。在较高含量的情况下,拉伸强度和其他机械性能的损失通常是不可接受的。表5提供了一系列硅氧烷聚氨酯体系的机械性能。
厚膜有机硅涂料
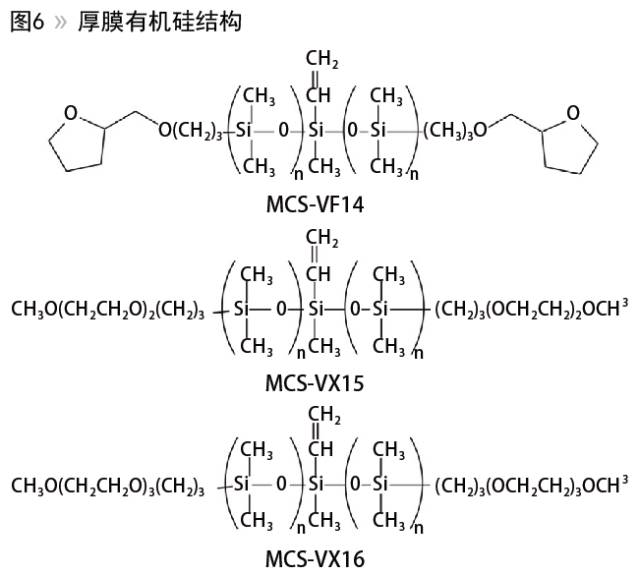
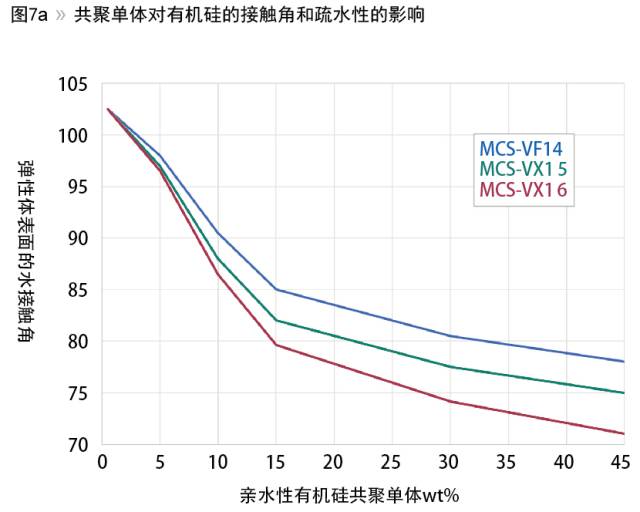
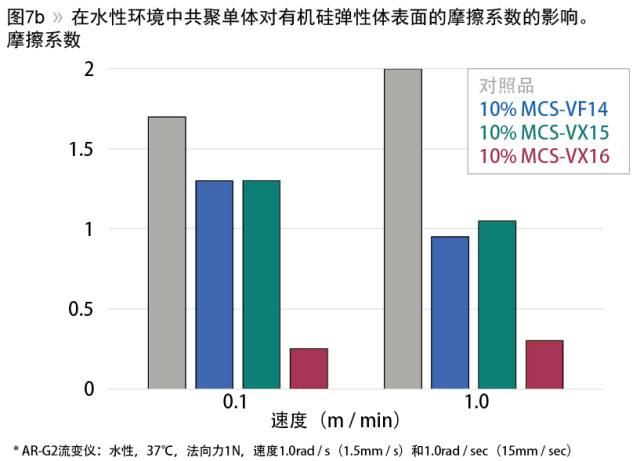
与配方有关,有机硅涂层引起了广泛的触觉反应。如果它们含有低相对分子质量、特别是挥发性物质,则它们与“丝般”的感觉相关并且表现出滑动性能。另一方面,低相对分子质量物质已经除去的有机硅涂层与“粘性”触感相关。这两种体验的共同之处是聚合物的极度疏水性。当有机硅涂层不含低相对分子质量物质时,它们表现出高摩擦系数,并由于其具有相对较低的机械性能,在连续触觉交互作用过程中会出现磨料和粘合剂剥落的失效情况。已知的硅氧烷,具有中心乙烯基官能团的、分散的PEG2(MCS-VX15)、PEG3(MCS-VX16)或者四氢化糠基(THF)(MCS-VF14)侧端基可以用作加成固化的共聚单体,铂催化的双组份有机硅弹性体配方能带来亲水性(图6)。在这些配方中,通过加入能吸附水的流体动力学润滑层能改变表面摩擦性能。在双组份配方中使用高达15%(质量比)的共聚单体,改性的有机硅弹性体保留这种类型材料的光学透明度以及机械性能特征。有机硅弹性体表面上去离子水的接触角测量结果显示,采用规定的共聚单体含量,润湿性得到改善:在共聚单体含量为8%(质量比)时,弹性体表面从疏水性(接触角?120°)变为亲水性(接触角<90°)(图7a)。改性有机硅弹性体的摩擦系数测量值显示,随着共聚单体使用量的增加,表面润滑性提高(图7b)。
需要特定生物界面响应的触感涂层的用途,在需求和性能规范的复杂性方面将继续增长。在对响应关键的软交互作用领域,基于聚氨酯和有机硅的材料都将占主导地位。通过使用具有固有物理性能和结构控制的反应性远螯硅氧烷和大分子硅氧烷,现在基于聚氨酯和有机硅的触感交互交互涂层的性能范围能进一步扩大。
更多关于材料方面、材料腐蚀控制、材料科普等方面的国内外最新动态,我们网站会不断更新。希望大家一直关注中国腐蚀与防护网http://www.ecorr.org
责任编辑:王元
投稿联系:编辑部
电话:010-62313558-806
中国腐蚀与防护网官方 QQ群:140808414
免责声明:本网站所转载的文字、图片与视频资料版权归原创作者所有,如果涉及侵权,请第一时间联系本网删除。
相关文章

官方微信
《中国腐蚀与防护网电子期刊》征订启事
- 投稿联系:编辑部
- 电话:010-62316606-806
- 邮箱:fsfhzy666@163.com
- 中国腐蚀与防护网官方QQ群:140808414
点击排行
PPT新闻

“海洋金属”——钛合金在舰船的
点击数:8125

腐蚀与“海上丝绸之路”
点击数:6461